 Comptes Rendus Palevol
5 (3-4) - Pages 541-549
Comptes Rendus Palevol
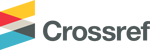
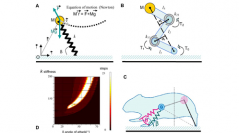
5 (3-4) - Pages 541-549Locomotion is a behaviour resulting from the interaction of the nervous and musculoskeletal systems and the environment. However, the musculoskeletal systems of some terrestrial mammals present an intrinsic ability to realize a dynamic stable locomotion. Current anthropomorphic passive walkers demonstrate that a pure mechanical system with legs and arms is able to walk down an inclined plane. Numerical simulations confirm that self-stabilization of the mechanics is acting in running too. The necessity to ensure the dynamic stability of a cyclic locomotion set physical constraints to the musculo-skeletal system. A description of the locomotor apparatus with neuromechanical variables like the stiffness – accessible to the experimentation – enables for maintaining the number of degrees of freedom of biomechanical models as low as possible. The maximization of the robustness of the mechanical self-stabilization of the models with regard to the body proportions represents for future simulations an optimization criterion that should bring a new light into the comprehension of the body proportions.
Stability, Locomotion, Body proportion, Running, Quadruped mammals