 Comptes Rendus Palevol
5 (3-4) - Pages 541-549
Comptes Rendus Palevol
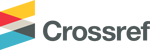
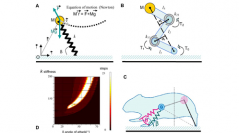
5 (3-4) - Pages 541-549La locomotion résulte de l'interaction du système nerveux, du système ostéomusculaire et de l'environnement. Cependant, le système musculo-squelettique de certains mammifères terrestres apparaît avoir acquis une capacité intrinsèque à se mouvoir d'une façon dynamiquement stable. Les robots marcheurs passifs actuels nous montrent qu'une structure mécanique avec des jambes et des bras est capable de descendre le long d'un plan incliné sans source de contrôle supplémentaire. Les simulations numériques semblent, de plus, montrer que des phénomènes d'autostabilisation de la mécanique sont à l'œuvre pendant la course également. La nécessité d'assurer une locomotion cyclique dynamiquement stable est porteuse, elle aussi, de contraintes physiques à définir, à découvrir. L'étude des relations entre stabilité dynamique et morphologie suppose une modélisation du système étudié et l'utilisation de l'outil simulation numérique. Une description du système avec des variables neuromécaniques telle la raideur, accessible à l'expérimentation, permet de contenir le nombre de degrés de liberté du modèle. La maximisation de la robustesse de l'autostabilisation mécanique, c'est-à-dire la maximisation de l'intensité de la perturbation que le système en mouvement est capable de supporter sans tomber, fournit pour les futures simulations un critère d'optimisation capable d'éclairer d'une façon nouvelle notre compréhension des proportions du squelette.
Stabilité dynamique, Locomotion, Proportion, Segment, Course, Mammifères quadrupèdes